どのように投影を見つけるのですか?
図面では、幾何学的物体の画像投影法を用いて構築される。しかし、この1つのイメージでは十分ではないので、少なくとも2つの投影が必要です。彼らの助けを借りて、ポイントはスペースで決まります。したがって、ポイントの投影を見つける方法を知る必要があります。
投影点
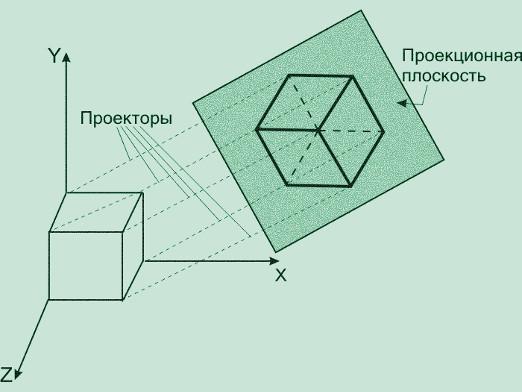
これを行うには、空間を考慮する必要があります二面角を内点(A)とする。ここでは、投影面の水平方向のP1と垂直方向のP2を使用します。点(A)は投影面に直交して投影される。垂直に投射されるビームに関しては、それらは、投影面に垂直な投影面に結合される。したがって、P2 / P1軸に沿って回転することによって水平P1および前方P2平面が整列されると、平面図が得られる。
次に、軸に垂直に投影点によってその上に配置される。それで、それは複雑な図を描いています。ビルドアップされたセクションと垂直通信ラインのおかげで、投影面に対するポイントの位置を決定するのは簡単です。
投影を見つける方法を理解しやすくするために、直角三角形を考える必要があります。その短辺は脚であり、長い辺は斜辺です。斜辺で脚を投影すると、2つのセグメントに分割されます。その値を決定するには、最初のデータセットの計算を実行する必要があります。この三角形について、基本的な投影を計算する方法を考えてみましょう。
原則として、このタスクでは、脚Nの長さと斜辺Dの長さを示し、その投影が見出される。これを行うために、我々は脚の投影を見つける方法を学ぶ。
脚(A)の長さを見つける方法を考えてみましょう。脚の投影の幾何学的平均と斜辺の長さが所望の脚のサイズと等しいことを考えると、N =√(D * Nd)である。
投影の長さの求め方
作品の根は、所望の正方形の脚の長さ(N)、その後は、斜辺の長さで割った:たNd =(N /√D)²=N²/ D.脚とデータD Nのみ初期値を参照し、突出長さはピタゴラスの定理を使用して見つけなければなりません。
これを行うには、√(N²+T²)臍の値を使って、その結果の値を次の式に代入して投影を求めます:Nd =N²/√(N²+T²)。
元のデータが長さ情報斜辺Dのデータだけでなく、RD脚の投影も、簡単な減算式ND = D-RDを用いて第2脚NDの投影長を計算する必要がある。
スピードプロジェクション
速度プロジェクションを見つける方法を検討してください。 与えられたベクトルが動き記述を表現するためには、座標軸上の投影に配置する必要があります。 1つの座標軸(光線)、2つの座標軸(平面)、3つの座標軸(空間)があります。投影を見つけるときは、ベクトルの両端から軸上に垂線を落とす必要があります。
投影の意味を理解するには、ベクトルの投影を見つける方法を学ぶ必要があります。
ベクトルの投影
身体が軸突起が点として表され、ゼロの値を有するであろう。動きが平行座標軸で行われる場合、投影は、ベクトルユニットと一致します。このような軸に対して角度φに向け速度ベクトルその本体が移動(x)は、この軸上への投影はセグメントあろう場合には: - 速度ベクトルのモデルV(X)V。•COS(φ)、Vが=。速度ベクトルの方向と座標軸が一致したときに、突起が正であり、そして逆もまた同様です。
我々は以下の座標方程式をとる。 X = X(t)は、yはY(T)=、Z = Z(T)。この場合、関数速度が三の軸上に投影され、以下の形式を有する:V(X)= DX / DT = X "(t)は、V(Y)= DY / DT = Y"(t)は、V(Z) 。= DZ / DT = Z「(t)は、必要この形式の方程式:。V = V(X)•iが+ V(Y)•jを+ V(zで表さ速度自身の速度ベクトルを求めるための誘導体を取ることになります.. V =√(V(X)^ 2 + V(Y)^ 2 +:)•K、I、J、Kは、それぞれ座標軸X、Y、Zの単位ベクトルは、このように、速度単位は以下の式によって算出されるされますV(Z)^ 2)。